2026.04.16
自動運転技術は長きにわたる実証実験を経て、いよいよ本格的な社会実装のフェーズへと移行しつつあります。しかし、ひと口に「自動運転」といっても、運転支援レベルから完全無人運転までその定義は多岐にわたります。
そこで本記事では、米国の非営利団体「SAEインターナショナル」の定める自動運転レベルや、現在どのレベルまで実用化されているかについて詳しく解説します。完全自動運転の実現に向けた課題や展望も紹介しますので、自社のビジネス戦略を考える上での参考にしてください。
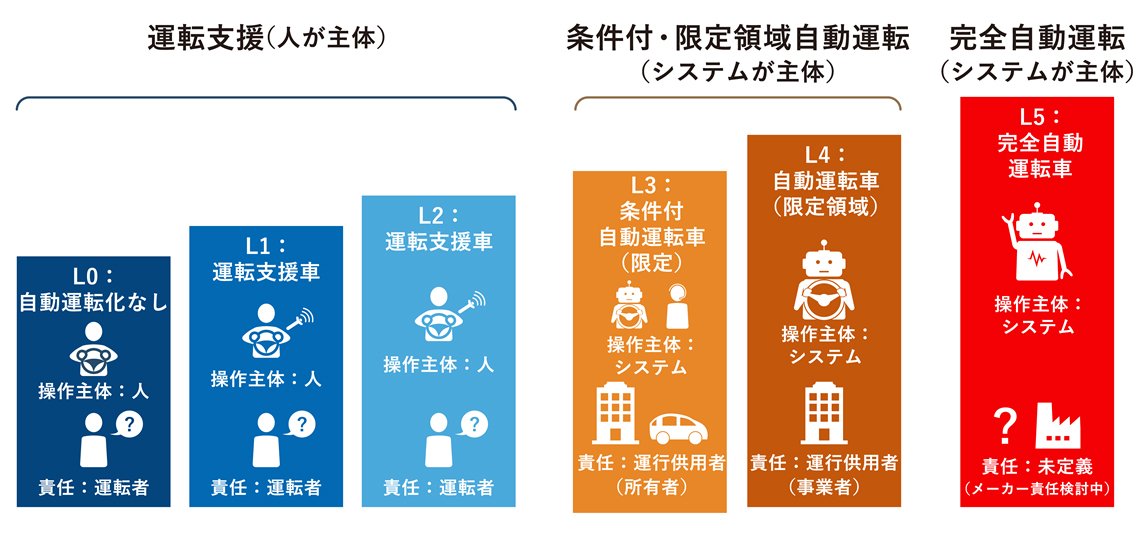
現在、自動運転技術は、機能の高度さに応じて「レベル0(運転支援なし)」から「レベル5(完全自動運転)」までの6段階に分類されています。この区分は、単なる技術的な目安ではなく、自動車メーカーの開発指針や各国の法規制、保険制度などを定める際の共通指標として非常に重要な役割を果たしています。
世界的に採用されている自動運転レベルの定義は、米国の非営利団体であるSAE(Society of Automotive Engineers)インターナショナル(※1)が策定した「SAE J3016」という規格に基づいています。(※2)日本を含む主要国でSAE基準が採用されていて、各国の法整備や技術開発の指針となっています。
この定義を理解する上で特に重要なのが、以下の2つの視点です。
●運転主体(誰が運転を行うのか)
「人間(ドライバー)」が主役なのか、それとも「システム」が主役なのかという点です。
●走行領域(どの範囲で作動するのか)
専門用語で「ODD(Operational Design Domain:運行設計領域)」と呼ばれます。高速道路のみ、特定の敷地内のみ、あるいは天候条件など、システムが作動する限定条件をさします。
レベルが上がるにつれて、運転の主導権は「人」から「システム」へと段階的に移行していきます。特に「レベル2」と「レベル3」の間には大きな境界線があり、レベル2まではドライバーが周辺を常に監視する義務がありますが、レベル3以上では一定の条件下でシステムが運転の責任を担うようになります。
日本では、国土交通省や警察庁がSAEの定義を踏襲しつつ、独自の呼称を併用しています。レベル1〜2は「運転支援車」、レベル3以上は「自動運転車」と区別しており(※3)、ここが「運転の主体(責任)」が人からシステムへ移る大きな境界線となっています。
2020年4月施行(改正道路交通法):
一定の条件下(高速道路の渋滞時など)で、システムが運転を担う「レベル3」の公道走行が認められる。
2023年4月施行(改正道路交通法):
特定のルートや区域において、運転者が存在しない状態でシステムが完全に運転を行う「レベル4(特定自動運行)」が許可制で解禁。
ただし、自動運転中の事故責任については、民事(損害賠償)、刑事(過失致死傷)、行政(免許点数)の各側面から慎重な判断がなされます。
各レベルの違いを理解する上で重要な指標となるのが「運転操作の主体」と「事故時の責任の所在」です。これを整理すると、以下のようになります。
なお、この表の『一次責任』とは、主に被害者への損害賠償(民事責任)を指します。刑事罰については、個別の過失状況(介入要求への対応など)により判断が分かれます。
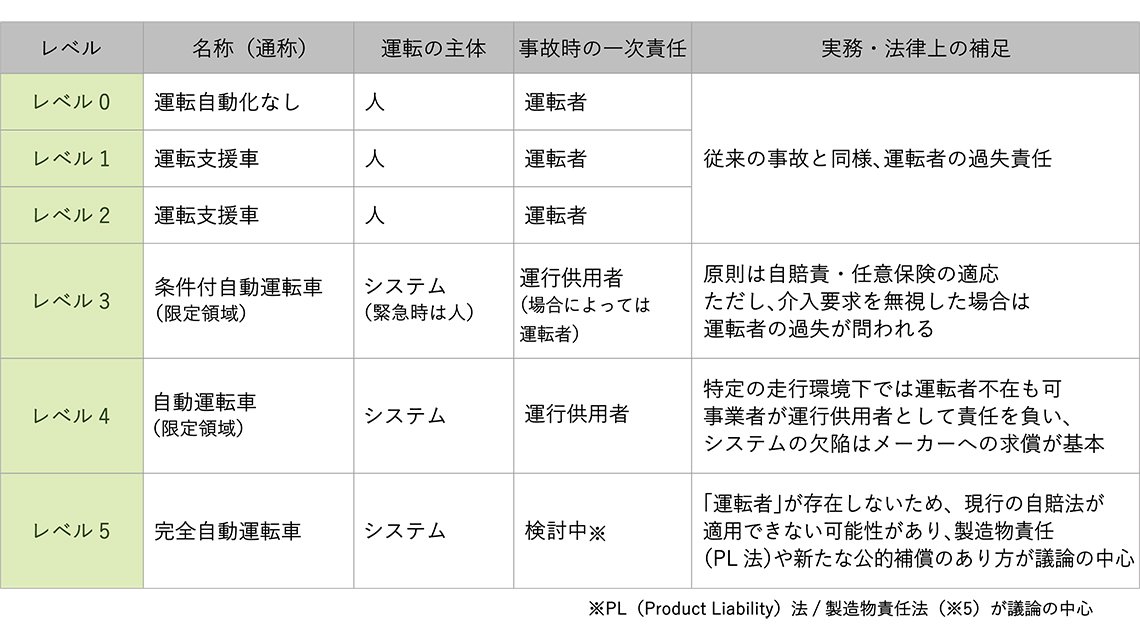
ここで特に注意すべき点が、レベル2とレベル3の間にある「責任の壁」です。
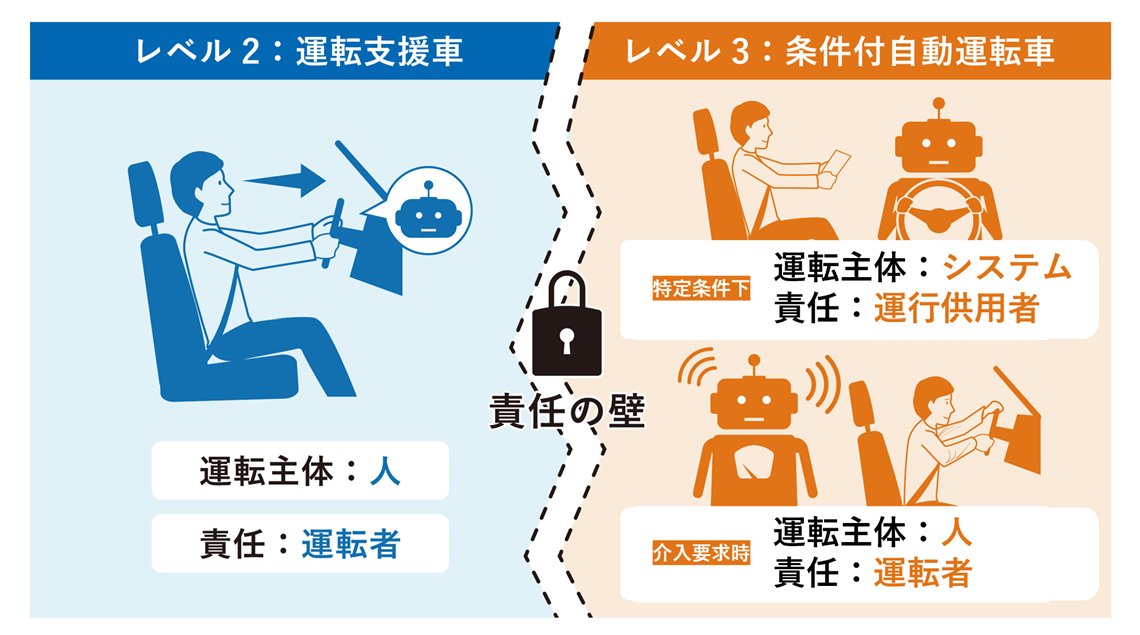
●「レベル2」と「レベル3」の間にある「責任の壁」
レベル2までは、あくまでシステムは「運転支援」にとどまり、事故時の責任は基本的に運転者にあります。
一方、レベル3からは、特定の条件下で運転主体が「システム」へ移行します。システム作動中は、運転者がハンドルから手を離したり、前方から目を離したりすることも可能です。ただし、システムが対応困難と判断して介入要求を発した場合には、運転者が適切に運転を引き継ぐ義務が生じます。(※4)この交代が遅れた場合の事故責任は運転者に帰すため、完全にシステム任せにできるわけではない点がレベル3の大きな特徴です。
表のとおり、事故時の賠償に個人の保険が使われますが、これは運転者の過失を認めるものではありません。あくまで被害者救済を優先するための仕組みであり、システム欠陥が原因であれば、最終的な負担は保険会社からメーカーへと請求される等の流れになります。
●レベル4以上は「システムがバックアップ」も担う
これに対し、レベル4以上では、緊急時の対応も含めてシステムが運転操作を担うことが想定されています。レベル4以上であれば、理論上はドライバー不在の無人運行も可能です。ただし、事故時の損害賠償責任については、現行法では引き続き運行供用者(事業者・所有者)が一次的に責任を負う仕組みが維持されています。
●現時点のゴールとされる「レベル5」
最上位のレベル5(完全自動運転)では、走行エリアや天候などの制限が一切なくなり、「運転操作の主体」は常にシステムとなります。レベル4までと異なり、人間が運転を代わることを想定していないため、車内にハンドルやアクセルペダルが存在しない形態も考えられます。
また、「責任の所在」については現在世界中で議論が進んでいる段階ですが、人間が運転に一切関与しない以上、従来のドライバー責任を問うことは困難です。将来的には、システムの不具合による事故であれば、自動車メーカーやシステム開発者が負う「製造物責任(PL法)」を軸とした新たな法的枠組みが必要になると予測されています。
各レベルの具体的な特徴と、2026年現在における実用化の進捗状況を見ていきましょう。
従来の一般的な自動車がこれに該当し、ドライバーが全ての運転操作を行います。衝突被害軽減ブレーキ(自動ブレーキ)や車線逸脱警報といった機能は普及していますが、これらはあくまで警告や一時的な補助に過ぎません。
システムによる継続的な操作支援が行われない限り、最新の安全機能を搭載していても定義上はレベル0に分類されます。
システムが「走る・曲がる・止まる」のうち、いずれか一つの操作を継続的にサポートする段階です。例えば、前の車に追従して速度を調整するアダプティブクルーズコントロール(ACC)や、車線維持支援機能などが該当します。
現在、こうした機能は高級車に限らず、軽自動車を含む多くの新型車に搭載される標準的な機能となっています。
システムが、アクセル・ブレーキによる速度調整と、ハンドルによる操舵を同時に制御します。近年は、高速道路などの特定条件下でハンドルから手を離せる「ハンズオフ機能」を搭載した車種も増えていて、長距離移動の疲労軽減に役立っています。
ただし、あくまで運転の主体は運転者にあり、常に周囲を監視して安全確保をする義務があり、脇見運転(アイズオフ)は認められていない点に注意が必要です。
高速道路の渋滞時など、特定の条件下においてシステムが全ての運転タスクを代行します。この間、運転者はハンドル操作や前方監視から解放され、車載モニターでの動画視聴やスマホ操作といった運転操作以外の行為「セカンダリ・アクティビティ」が可能です。
ただし、天候悪化やシステムが対応困難と判断した場合は、運転者が速やかに運転を引き継ぐ必要があります。そのため、レベル3は完全な自動運転とは区別される段階です。
特定のエリアやルート内に限定して、緊急時の対応も含めてシステムが運転を完結的に実行します。ドライバーの存在を前提としないため、運転席のない車両による無人運行も可能です。
日本では、特定の地域・エリアにおける無人移動サービスや巡回バスとして実装がはじまっています。(※6)また、高速道路での自動運転トラックはまだ実証段階にあるものの、本格導入に向けた動きが加速しています。
走行エリアや道路条件の制限がなく、あらゆる環境下でシステムが運転を行う最終段階です。ハンドルやペダルなどの操作機器も不要となり、車内は「移動する空間」へと大きく変わります。
現在はまだ研究開発段階にあり、AIの判断能力向上や法整備などの多くの課題をクリアした上で、将来的な実用化が期待されています。
自動運転の高度化には、車両単体の技術進化だけでなく、それを支える社会基盤の整備が欠かせません。ここでは、技術面と社会実装の両面から、特に重要なポイントを整理します。
自動運転の根幹を支えるのが、周囲を正確に把握する「目(センサー)」と、複雑な状況で瞬時に判断を下す「脳(AI)」の進化です。
●センシング技術:融合か、特化か
現在は、カメラ、ミリ波レーダー、LiDAR(ライダー)という特性の異なるセンサーを組み合わせ、互いの弱点を補い合う手法が主流です。
カメラ:標識や信号の色、歩行者の動きなどを識別
レーダー:悪天候でも遠方の車両との距離・速度を計測
LiDAR:レーザー光を用いて周囲の立体構造を精密に把握
近年、技術の方向性は二極化しています。コストを抑えつつカメラで捉えた画像・映像とAIの解析力で全てを補う「LiDARレス(ビジョン方式)」と、悪天候下での信頼性を高める「4Dイメージングレーダー」などの高精度センサーを積極的に導入するアプローチが競い合っています。
●AI技術:ルールベースから「E2E」へのパラダイムシフト
AIの分野では、従来の「ルールベース」から、次世代の「E2E(End-to-End)」技術への移行が急速に進んでいます。
●従来の「ルールベース」
「赤信号なら止まる」といったルールを人間が膨大にプログラミングする手法です。いわば教科書を丸暗記させるような方式ですが、入り組んだ交差点や工事現場の対処、予測不能な歩行者の動きを読んだ走行など、ルール化できない複雑な状況への対応に限界がありました。
●次世代の「E2E」
センサーからの入力から操作の出力までを一つのAIで一気通貫に処理します。熟練ドライバーの膨大な走行データを学習させることで、いわば「ベテランの運転を見て技を盗む」ように、AIが自ら最適な走りを学びます。
これにより、従来のプログラミングでは対応が難しかった「複雑な交差点での判断」や「予期せぬ障害物への回避」においても、より人間らしくスムーズな運転が可能になりつつあります。一方で、AIの判断根拠がブラックボックス化しやすいため、事故時の説明責任をどう果たすかといった新たな課題についても議論が進められています。
自動運転の安定した運用には、車両単体の「目」だけでなく、外部インフラとつながる仕組みが不可欠です。これを「協調型自動運転(Cooperative Automated Driving)」(※7)と呼びます。
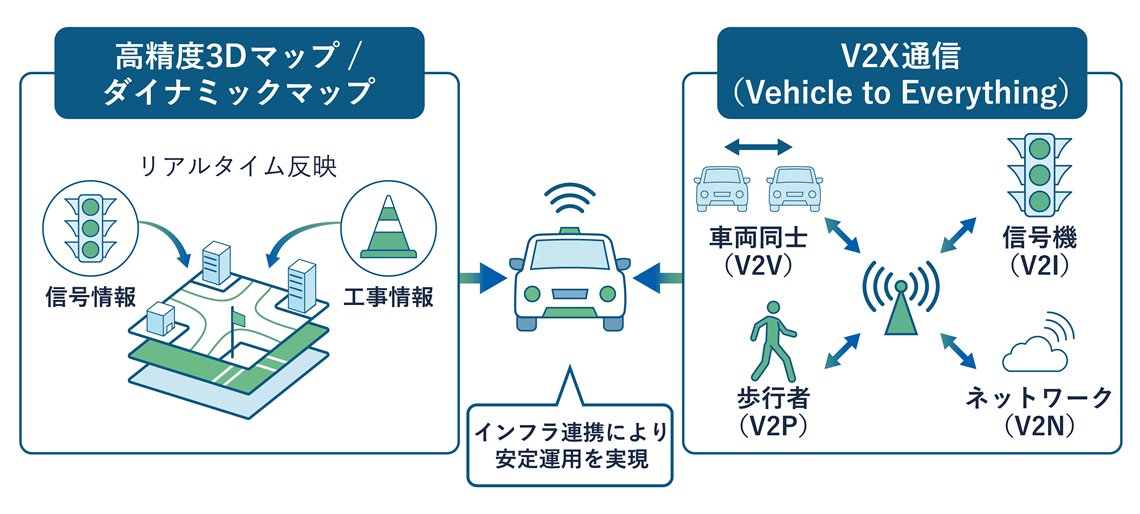
自動運転の安定した運用には、車両外部の情報を活用する仕組みも重要です。高精度3Dマップに信号情報や工事情報などをリアルタイムで反映させる「ダイナミックマップ」の実用化に向けた取り組みが進められています。
一方で、地図の維持・更新コストが課題とされていて、車両のセンサー情報を活用した地図更新技術の開発も進行中です。
さらに、車両同士や信号機などと通信を行う「V2X(Vehicle to Everything)」も注目されています。死角情報の共有や合流支援などを通じて、安全性や交通効率の向上につながる技術として期待されています。
●V2V(Vehicle-to-Vehicle):車車間通信
死角にいる他車の存在を把握し、スムーズな合流を支援
●V2I(Vehicle-to-Infrastructure):路車間通信
信号機の情報を取得し、交差点での事故を未然に防止
特に5G/6Gといった超高速・低遅延通信の活用により、車両単体のセンサーでは捉えきれない「数キロ先の渋滞」や「建物の陰に隠れた歩行者」の情報も瞬時に共有可能となり、安全性と交通効率が飛躍的に向上します。
自動運転車が社会に受け入れられるためには、事故を防ぐ「安全性」に加え、悪意ある攻撃から守る「セキュリティ」の確立が不可欠です。
車両が常時ネットワークに接続される(コネクテッド化する)自動運転車において、ハッキングによる遠隔操作や、位置情報の偽装(スプーフィング)といったリスクは、乗員の生命に直結する重大な脅威です。
これに対し、国連の自動車基準調和世界フォーラム(WP.29)が策定した国際基準に基づき、メーカーには開発から廃棄まで一貫したセキュリティ管理体制である「CSMS(サイバーセキュリティ管理システム)」の構築が義務付けられています。
技術が進化しても、それを公道で利用するための「ルール」がなければビジネスは成立しません。日本では、自動運転分野の法整備が進められ、すでに特定条件下での「無人運転」を可能にする法的枠組みが整っています。
現在、日本の自動運転ビジネスの基盤となっているのが、2023年4月施行の改正道路交通法による「特定自動運行(レベル4)の許可制度」(※9)です。事業者は都道府県公安委員会の許可を受けることで、特定ルートにおいて無人運転サービスを提供できます。
国際的には、国連欧州経済委員会(UNECE)が定める規則「UNR157」(※8)が自動運転レベル3〜4の指針となっています。
当初は時速60km以下に限定されていましたが、改正により上限速度は時速130kmまで引き上げられ、車線変更機能も認められるなど、高速道路での運用を想定した内容へと進化しています。
法人として特に注視すべきは「事故時の責任の所在」です。現在の日本の制度では、自動運転中の事故であっても「迅速な被害者救済」が最優先されます。
●民事責任(賠償責任)
レベル3およびレベル4の場合でも、原則として車両の所有者(運行供用者)が賠償責任を負う仕組み(自賠法の維持)となっています。(※10)
もしシステム欠陥が原因であれば、保険会社や法人が被害者に賠償した後、自動車メーカーに対して求償(費用の請求)を行う形が一般的です。現在、多くの損保会社から自動運転中の事故を補償する特約も提供されています。
●刑事責任と企業の管理義務
レベル4の無人運転では「運転者」が存在しないため、事故が起きた際の刑事責任は「特定自動運行実施者(法人)」の管理体制が問われることになります。(※11)
具体的には、以下の項目が適切であったかが判断の分かれ目となります。
・特定自動運行計画の順守状況
・遠隔監視員(特定自動運行業務従事者)への教育・訓練の徹底
・作動状態記録装置(EDR)等による、事故時のシステム状況の記録・保存
このように、レベル4の実装においては、現場の運転技術以上に、法としての運行管理・組織体制の構築が、企業のリスクマネジメントにおいて不可欠な要素となります。
法整備が進むなか、地域住民や利用者の「社会受容性」をいかに獲得するかという点も重要な焦点となります。
鹿児島県南さつま市でのレベル4本格運行に向けた取り組みでは、利用者の約91%が継続利用に好意的な回答を示すなど、交通弱者の支援策として高い受容性が確認されています。2026年以降は、単に「無人で走る」ことへの驚きを通り越し、高齢者の通院・買い物支援といった「生活インフラとしての質」が問われるフェーズに入っています。
サービスとしての完成度が信頼を生む
地域にサービスを定着させるためには、以下の3点が鍵となります。
●シームレスな体験
予約アプリの使い勝手や、既存の公共交通機関とのスムーズな乗り継ぎ(MaaS連携)
●安心の可視化
ハッキング対策(CSMS)の構築状況や、万が一の際の遠隔監視体制の公開
●持続可能なビジネスモデル
補助金に頼りすぎない適正な料金設定と、人手不足解消による地域貢献
事業者にとって、これらの要素を統合した「リスク管理と利便性の両立」こそが、自動運転ビジネスを成功させるための新たな経営指針となっています。
自動運転は自動車メーカーだけで完結する技術ではありません。IT企業、スタートアップ、インフラ企業が複雑に連携し、新たなエコシステムを形成しています。
●自動車メーカー:SDV化による付加価値の創出
2021年に世界初のレベル3量産車が登場して以降、技術の主戦場は「ハードウェア」から「ソフトウェア」へと移りました。2026年現在は、車両の機能を後からアップデートできる「SDV(Software Defined Vehicle)」の考え方が浸透しています。
高級EVへのレベル3標準装備だけでなく、普及価格帯の車種においても、高速道路でのハンズオフを可能にする「レベル2+」の採用が一般化しています。
●スタートアップと物流:特定環境でのレベル4実装
オープンソースの自動運転OS「Autoware」を活用した、工場・物流拠点内での自動搬送や、自治体向けのオンデマンド配車システムなど、特定条件下(ODD)でのレベル4実装が着実に進展しています。(※12)
また物流業界では、マンション内やオフィス街での「ラストワンマイル配送ロボット」が、改正道路交通法に基づく「遠隔操作型小型車」として2026年中の完全実用化をめざし、共同配送モデルの構築が進められています。
●サプライヤー:部品からソリューションへ
サプライヤー(部品メーカー)の役割も劇的に変化しています。従来の部品単体での提供から、AIによる運行最適化や、サイバーセキュリティ規格(ISO/SAE 21434)への準拠支援など、安全なモビリティ社会を裏側から支える「ソリューションプロバイダー」へと進化を遂げています。
自動運転技術は今後、「レベル2〜3の普及」と「レベル4の特定エリア拡大」が並行して進み、段階的に本格的な社会実装期へ移行していくと予測されます。(※13)
この変化は、交通事故削減や物流効率化といった社会課題の解決だけでなく、移動時間を価値へ変える新たなビジネス機会を生み出します。
企業には、単なる移動手段の導入にとどまらず、自社サービスや物流網全体を再設計する視点が求められます。自動運転は「待つ未来」ではなく「活用する未来」です。
まずは自社の課題と照らし合わせ、実証導入やパートナー企業の検討など、現実的な一歩から検討してみてはいかがでしょうか。
「スマートモビリティソリューション」では、自動運転を支援するさまざまなソリューションを提案していますので、ぜひご活用ください。